Next: 4.2.5 Angle-Preserving Mappings Up: 4.2 Transformations Previous: 4.2.3 Reflections/Mirroring
A general reflection at the plane ![]() can be described by first rotating
can be described by first rotating
![]() into some vector
into some vector ![]() , then reflect at
, then reflect at ![]() and now rotate back
and now rotate back ![]() to
to ![]() .
In fact, let
.
In fact, let ![]() .
Then this first rotation is given by
.
Then this first rotation is given by
![]() and we have
and we have
How can rotations be described by matrices?
Let us first consider 2-dimensional space.
The rotation by ![]() maps any vector
maps any vector ![]() to a normal vector
to a normal vector ![]() of the same length.
There are only two possibilities for
of the same length.
There are only two possibilities for
![]() namely
namely
![]() , and the one with
, and the one with ![]() is rotation in the positive direction, i.e.
counterclockwise. The matrix corresponding to this rotation is given by
is rotation in the positive direction, i.e.
counterclockwise. The matrix corresponding to this rotation is given by
rotate *z.
Similarly rotations around the ![]() - and around the
- and around the ![]() -axes are given by
-axes are given by
 and
and 
rotate *x and rotate *y.
Note that the composition of two rotations by angles ![]() and
and ![]() around the same center is the rotation by angle
around the same center is the rotation by angle
![]() .
Expressing this via the corresponding matrices gives the addition laws
for
.
Expressing this via the corresponding matrices gives the addition laws
for ![]() and for
and for ![]() .
.
All these rotation matrices ![]() (as well as arbitrary compositions of such)
satisfy
(as well as arbitrary compositions of such)
satisfy ![]() and
and
![]() , thus are special orthogonal
matrices.
, thus are special orthogonal
matrices.
A general rotation around the axis spanned by the unit vector ![]() by the angle
by the angle ![]() is given by considering the orthogonal frame given by
is given by considering the orthogonal frame given by
![]() ,
, ![]() ,
,
![]() . The length of these vectors are
. The length of these vectors are
![]() ,
,
![]() ,
,
![]() .
The vector
.
The vector ![]() is given in this frame as
is given in this frame as
| and hence |
Let ![]() be an arbitrary length preserving mapping (a so called EUCLIDEAN MOTION),
i.e.
be an arbitrary length preserving mapping (a so called EUCLIDEAN MOTION),
i.e.
![]() for all
for all ![]() .
Up to the translation by
.
Up to the translation by ![]() (i.e. replacing
(i.e. replacing ![]() by
by
![]() )
it preserves also the origin
)
it preserves also the origin ![]() and hence
and hence
![]() for all
for all ![]() .
Furthermore by
the polarization equality
.
Furthermore by
the polarization equality
 |
Let now conversely an orthogonal ![]() -matrix
-matrix ![]() be given.
Then
be given.
Then
![]() , i.e.
, i.e.
![]() . Let us assume first that
. Let us assume first that ![]() .
.
Let
![]() be the set of its fixed points,
i.e. the eigenspace for the eigenvalue 1.
This is a linear subspace.
be the set of its fixed points,
i.e. the eigenspace for the eigenvalue 1.
This is a linear subspace.
We show next, that ![]() .
Let
.
Let
![]() be the
characteristic polynomial of
be the
characteristic polynomial of ![]() .
We have
.
We have
 |
||
 |
In case its dimension is 3, we have
![]() .
.
In case its dimension is 2, we find a unit vector ![]() such that
such that
![]() . Since
. Since ![]() is invariant under
is invariant under ![]() and
and ![]() is orthogonal
the same is true for
is orthogonal
the same is true for ![]() . Since
. Since
![]() and
and ![]() is an isometry we have
is an isometry we have
![]() and hence
and hence ![]() is the reflection at the plane
is the reflection at the plane ![]() .
In fact,
.
In fact,
![]() for all
for all ![]() , since
, since
 |
||
Remains to consider the case, where
![]() . Then there exists a unit vector
. Then there exists a unit vector ![]() which spans
which spans ![]() .
The orthogonal plane
.
The orthogonal plane
![]() is also
is also ![]() invariant,
so
invariant,
so
![]() is orthogonal on this plane and hence
a reflection on a line in this plane or a rotation in this plane.
Thus
is orthogonal on this plane and hence
a reflection on a line in this plane or a rotation in this plane.
Thus ![]() is a reflection at the plane spanned by
is a reflection at the plane spanned by ![]() and the reflection line
of
and the reflection line
of
![]() or a rotation with axis
or a rotation with axis ![]() .
.
Therefore any orthogonal mapping on
![]() is the composite of (at most three)
reflections. It is a rotation around some axes
is the composite of (at most three)
reflections. It is a rotation around some axes ![]() by some angle
by some angle ![]() iff it is a composite of two reflections.
iff it is a composite of two reflections.
In Pov-Ray: ![]()
vaxis_rotate
![]() .
.
Finally the euclidean motions are exactly of the form
![]() , where
, where ![]() is a rotation which is followed by the translation
is a rotation which is followed by the translation
![]() .
.
We show next that any rotation (i.e. special orthogonal matrix) can be obtained by composing 3 of the special rotations discussed above by the so called EULER ANGLES. Consider an airplane or an hang-glider: We have the basis given by the axes of airplane: the direction from the left to the right wing, the vertical direction, and the direction from back to front.
![$\displaystyle [R_1]:=\begin{pmatrix}
\cos(\psi ) & 0 & -\sin(\psi ) \\
0 & 1 & 0 \\
\sin(\psi ) & 0 & \cos(\psi )
\end{pmatrix}$](img450.png)
![$\displaystyle [R_2]_{\mathcal B',\mathcal B'}=
\begin{pmatrix}
1 & 0 & 0 \\
0 &\cos(\th ) & -\sin(\th ) \\
0 & \sin(\th ) & \cos(\th )
\end{pmatrix}$](img452.png)
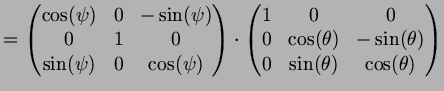 |
![$\displaystyle [R_3]_{\mathcal B'',\mathcal B''} =
\begin{pmatrix}
\cos(\varphi ...
...arphi ) & 0 \\
\sin(\varphi ) & \cos(\varphi ) & 0 \\
0 & 0 & 1
\end{pmatrix}$](img463.png)
 |
||
 |
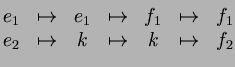
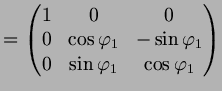
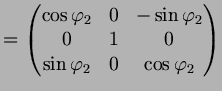
Another decomposition into 3 rotations is given via the following
Euler-angles:
Let ![]() be a rotation and
be a rotation and
![]() be the images of the standard-basis.
We would like to express
be the images of the standard-basis.
We would like to express ![]() as composition of 3 rotations around some
coordinate-axes.
It suffices to describe the images of these rotations on the first 2 vectors
as composition of 3 rotations around some
coordinate-axes.
It suffices to describe the images of these rotations on the first 2 vectors
![]() and
and ![]() , since
, since
![]() is the uniquely determined unit vector
normal to
is the uniquely determined unit vector
normal to
![]() and
and ![]() such that
such that
![]() is left oriented.
is left oriented.
In order to rotate ![]() to
to ![]() we have to keep
an axis
we have to keep
an axis
![]() fixed.
In order to rotate afterwards
fixed.
In order to rotate afterwards ![]() to
to ![]() without destroying
the assignment
without destroying
the assignment
![]() , we could first
rotate
, we could first
rotate ![]() to
to ![]() around
around ![]() and at the end
rotate
and at the end
rotate ![]() to
to ![]() around
around ![]() .
.
 |
||
 |
||
 |
![\begin{multline*}[R_3\o R_2\o R_1]_{e_1,e_2,e_3} = \\
= \begin{pmatrix}
1 & 0 ...
...hi _3 \\
0 & \sin\varphi _3 & \cos\varphi _3 \\
\end{pmatrix}\end{multline*}](img497.png)
Andreas Kriegl 2003-07-23
![\includegraphics[width=0.4\textwidth]{rot-3.eps}](img383.png)
![\includegraphics[width=0.45\textwidth]{drachen-1.eps}](img470.png)
![\includegraphics[width=0.45\textwidth]{drachen-2.eps}](img471.png)
![\includegraphics[width=0.45\textwidth]{drachen-3.eps}](img472.png)
![\includegraphics[width=0.45\textwidth]{drachen.eps}](img473.png)
![\includegraphics[width=0.45\textwidth]{euler-ang-1}](img485.png)
![\includegraphics[width=0.45\textwidth]{euler-ang-2}](img486.png)
![\includegraphics[width=0.45\textwidth]{euler-ang-3}](img487.png)
![\includegraphics[width=0.45\textwidth]{euler-ang-4}](img488.png)