Nächste Seite: 13 Euklid'ische Geometrie Aufwärts: Mathematik 1 für Informatik Vorherige Seite: 11 Gleichungssysteme Inhalt Index
Wir wollen nun eine Methode behandeln, welche uns erlaubt die Invertierbarkeit einer linearen Abbildung festzustellen und auch Formeln für die Inverse liefert.
12.1 Bemerkung.
Wir haben in (10.27) gezeigt, daß eine Matrix
 genau dann invertierbar ist, wenn
genau dann invertierbar ist, wenn
![]() es ist
und die Inverse ist dann durch
es ist
und die Inverse ist dann durch
Der Ausdruck
![]() heißt Determinante von
heißt Determinante von
![]() und wird mit
und wird mit
![]() bezeichnet. Die geometrische Bedeutung von
bezeichnet. Die geometrische Bedeutung von
![]() ist gerade
gelbe Fläche des Parallelogramms
ist gerade
gelbe Fläche des Parallelogramms
![]() in folgender Zeichnung,
in folgender Zeichnung,
![\includegraphics[scale=0.7]{linalg-1001}](img3156.png)
den diese
ergibt sich aus der Fläche
![]() des Rechtecks
des Rechtecks
![]() vermindert um die blaue Fläche
vermindert um die blaue Fläche
![]() der beiden Rechtecke
der beiden Rechtecke
![]() und
und
![]() sowie
die gemeinsame Fläche
sowie
die gemeinsame Fläche
![]() der beiden roten Dreiecke
der beiden roten Dreiecke
![]() und
und
![]() und die gemeinsame Fläche
und die gemeinsame Fläche
![]() der beiden grünen Dreiecke
der beiden grünen Dreiecke
![]() und
und
![]() .
Insgesamt also
.
Insgesamt also
Die Determinante von
![]() -Matrizen ist bilinear, denn
-Matrizen ist bilinear, denn

Geometrisch liegt das daran, daß wir im Parallelogrammen eine Seite unter Beibehaltung der Höhe verschieben dürfen. Wir können also o.B.d.A. annehmen, daß zwei Rechtecke vorliegen. Für diese ist diese Additionseigenschaft aber offensichtlich:
![\includegraphics[scale=0.7]{pic-1049}](img3172.png)
Wir versuchen dies nun auf höher-dimensionale
![]() übertragen.
Erstes Ziel dabei ist eine Funktion
übertragen.
Erstes Ziel dabei ist eine Funktion
![]() anzugeben
die
anzugeben
die
![]() Vektoren
Vektoren
![]() das Volumen
das Volumen
![]() des von Ihnen aufgespannten
Parallelipipeds zuordnet.
Solch eine Funktion müßte offensichtlich folgende Eigenschaften haben:
des von Ihnen aufgespannten
Parallelipipeds zuordnet.
Solch eine Funktion müßte offensichtlich folgende Eigenschaften haben:
Jede Determinantenfunktion hat folgende weitere Eigenschaften:
| (1) | ||
| (2) |
 |
||
 |
||
 |
||
 |
||
12.2 Bemerkung.
Determinantenfunktionen sind im wesentlichen eindeutig, d.h. durch
ihren Wert auf einer Basis eindeutig bestimmt.
Beweis. Es sei
 |
||
 |
||
 |
||
 |
Bemerkung.
Es sei
![]() eine Determinatenfunktion und
eine Determinatenfunktion und
![]() eine Basis.
Wegen
eine Basis.
Wegen
![]() existieren Vektoren
existieren Vektoren
![]() mit
mit
![]() und wegen der Formel im Beweis von (12.2)
ist somit auch
und wegen der Formel im Beweis von (12.2)
ist somit auch
![]() .
.
Mittels Determinantenfunktion können wir lineare Unabhängigkeit erkennen:
12.3 Lemma.
Es sei
![]() eine Determinatenfunktion und
eine Determinatenfunktion und
![]() .
Dann ist
.
Dann ist
![]() genau dann linear abhängig, wenn
genau dann linear abhängig, wenn
![]() .
.
Beweis. (
(
![]() ) Angenommen
) Angenommen
![]() ist linear unabhängig,
so ist
ist linear unabhängig,
so ist
![]() ,
denn
,
denn
![]() .
[]
.
[]
12.5 Definition.
Für eine Matrix
![]() definieren wir die Determinante durch die Leibniz-Formel als
definieren wir die Determinante durch die Leibniz-Formel als
12.4 Proposition.
Die Funktion
![]() ist eine Determinantenfunktion.
ist eine Determinantenfunktion.
Beweis. Es ist
 |
||
 |
||
|
||
 |
||
 |
 |
||
![\bgroup\color{demo}$\displaystyle \xymatrix{
a_{1,1}\ar@{-{}}[1,1] &a_{1,2}\ar@{...
...&a_{3,2}\ar@{-{}}[-1,1] &a_{3,3}\ar@{-{}}[-1,1] &
a_{3,1} &a_{3,2} \\
}$\egroup](img3259.png)
12.7 Beispiel.
Die Determinante einer Diagonalmatrix (d.h.
![]() für alle
für alle
![]() ) ist gerade das Produkt
der Diagonalelemente, den nur für
) ist gerade das Produkt
der Diagonalelemente, den nur für
![]() ist
ist
![]() .
.
Allgemeiner ist die Determinante einer Dreiecksmatrix ist gerade das Produkt
der Diagonalelemente, den nur für
![]() ist
ist
![]() .
In der Tat sei
.
In der Tat sei
![]() z.B. eine obere Dreiecksmatrix, d.h.
z.B. eine obere Dreiecksmatrix, d.h.
![]() für
alle
für
alle
![]() . Somit ist
. Somit ist
![]() falls
falls
![]() für
mindestens ein
für
mindestens ein
![]() ist. Nur die Permutationen
ist. Nur die Permutationen
![]() mit
mit
![]() für
alle
für
alle
![]() erfüllen
erfüllen
![]() . Die einzige Permutation mit
dieser Eigenschaft ist aber
. Die einzige Permutation mit
dieser Eigenschaft ist aber
![]() .
.
12.8 Multiplikationssatz.
Für
![]() gilt
gilt
![]() .
.
Beweis. Es sei
 |
||
Bemerkung.
Nach der einleitenden Motivation (12.2) ist
![]() gerade das
gerade das
![]() -dimensionale
Volumen des von den Spalten
-dimensionale
Volumen des von den Spalten
![]() von
von
![]() erzeugten Parallelipipeds
erzeugten Parallelipipeds
![]() ,
also vom Bild unter
,
also vom Bild unter
![]() des Einheitsquaders (den von den Standardbasis
des Einheitsquaders (den von den Standardbasis
![]() erzeugten Parallelipipeds).
Der Multiplikationssatz besagt nun gerade, daß
das Volumen
erzeugten Parallelipipeds).
Der Multiplikationssatz besagt nun gerade, daß
das Volumen
![]() des Bildes unter
des Bildes unter
![]() des von
des von
![]() erzeugten
Parallelipipeds
erzeugten
Parallelipipeds
![]() gerade das Volumen
gerade das Volumen
![]() des Parallelipipeds
des Parallelipipeds
![]() multipliziert mit
multipliziert mit
![]() ist. Somit mißt
ist. Somit mißt
![]() gerade das Verhältnis
des Volumens des Bildes
gerade das Verhältnis
des Volumens des Bildes
![]() von Parallelipipeden
von Parallelipipeden
![]() unter
unter
![]() zu
dem Volumen von
zu
dem Volumen von
![]() . Dies stimmt nicht nur für Parallelipipede sondern
für beliebige Körper
. Dies stimmt nicht nur für Parallelipipede sondern
für beliebige Körper
![]() welchen man ein Volumen zuordnen kann.
welchen man ein Volumen zuordnen kann.
Wir können nun die Determinante benutzen um Invertierbarkeit zu erkennen:
12.10 Proposition.
Es ist
![]() genau dann invertierbar, wenn
genau dann invertierbar, wenn
![]() ist.
ist.
Beweis. Nach (10.21) ist
12.11 Lemma.
Für invertierbares
![]() gilt
gilt
![]() .
.
Beweis. Wegen dem Multiplikationssatz (12.8) ist die Determinante der inversen Matrix gerade der Kehrwert der Determinante, denn
12.9 Bemerkung.
Für ein
![]() ist
ist
![]() als
als
![]() für irgendeine Matrixdarstellung
für irgendeine Matrixdarstellung
![]() von
von
![]() definiert, d.h. als
definiert, d.h. als
![]() ,
wobei
,
wobei
![]() der durch eine
Basis
der durch eine
Basis
![]() gegebene Isomorphismus ist aus (10.16).
Ist
gegebene Isomorphismus ist aus (10.16).
Ist
![]() eine weitere Basis und
eine weitere Basis und
![]() der
entsprechende Isomorphismus, so ist mit
der
entsprechende Isomorphismus, so ist mit
![]()
12.12 Definition.
Die Transponierte einer Matrix
![]() ist die Matrix
ist die Matrix
![]() ,
die durch Spiegelung von
,
die durch Spiegelung von
![]() an der Diagonale entsteht.
an der Diagonale entsteht.
Offensichtlich ist
![]() ,
,
![]() sowie
sowie
![]() .
.
Beweis.
 |
||
Unser nächstes Ziel ist nun eine Formel für die Inverse invertierbarer
Matrizen
![]() zu entwickeln.
zu entwickeln.
12.14 Definition.
Es sei
![]() eine quadratische Matrix.
Für
eine quadratische Matrix.
Für
![]() versteht man unter dem
versteht man unter dem
![]() -ten
algebraischen Komplement
-ten
algebraischen Komplement
![]() von
von
![]() die
Determinante
die
Determinante
![]() ,
also die Determinante folgender Matrix
,
also die Determinante folgender Matrix
 |
Als Adjungierte
![]() einer Matrix
einer Matrix
![]() bezeichnet man nun jene Matrix die
an der
bezeichnet man nun jene Matrix die
an der
![]() -ten Zeile und
-ten Zeile und
![]() -ten Spalte das
-ten Spalte das
![]() -te algebraische Komplement
-te algebraische Komplement
![]() von
von
![]() hat (Beachte die Vertauschung der Indizes).
hat (Beachte die Vertauschung der Indizes).
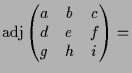
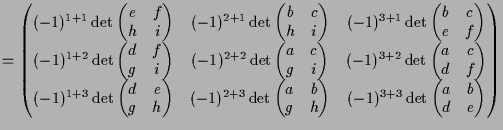
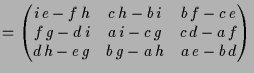
Beispiel.
Die Adjungierte einer
![]() -Matrix ist somit wie folgt gegeben
(vergleiche dies mit der Formel aus (10.27))
-Matrix ist somit wie folgt gegeben
(vergleiche dies mit der Formel aus (10.27))

 |
||
 |
||
 |
12.15 Bemerkung.
Es seien
![]() die Eintragungen der Matrix
die Eintragungen der Matrix
![]() der Identität
der Identität
![]() , d.h.
, d.h.
![]() und
und
![]() für
für
![]() .
Man nennt dies das Kronecker-Delta.
Dann ist
.
Man nennt dies das Kronecker-Delta.
Dann ist
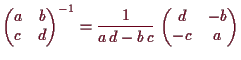
Damit erhalten wir die erhoffte Formel für die Inverse einer Matrix:
Vergleiche dies mit der Formel
Beweis. Die Gleichung
Division durch
![]() zeigt, daß
zeigt, daß
![]() eine
links-Inverses ist. Offensichtlich ist
eine
links-Inverses ist. Offensichtlich ist
![]() und somit folgt durch Transponieren von
und somit folgt durch Transponieren von
![]() die Identität
die Identität
![]() , also ist
, also ist
![]() die Inverse von
die Inverse von
![]() .
[]
.
[]
Allgemeiner als in (12.3) können wir mittels Determinanten auch die lineare Abhängigkeit beliebig vieler Vektoren feststellen:
12.19 Folgerung.
Vektoren
![]() sind genau dann linear abhängig, wenn
die Determinante jeder der
sind genau dann linear abhängig, wenn
die Determinante jeder der
![]() vielen
vielen
![]() -Teilmatrizen
der
-Teilmatrizen
der
![]() -Matrix
-Matrix
![]() gleich 0 ist.
gleich 0 ist.
Beweis. (
(
![]() ) Indirekt. Angenommen
) Indirekt. Angenommen
![]() ist linear unabhängig,
obwohl alle Determinanten der
ist linear unabhängig,
obwohl alle Determinanten der
![]() -Teilmatrizen von
-Teilmatrizen von
![]() gleich 0 sind. Nach (9.13) könne wir
gleich 0 sind. Nach (9.13) könne wir
![]() durch Hinzufügen von
Vektoren
durch Hinzufügen von
Vektoren
![]() zu einer Basis ergänzen. Nach (12.3) ist
damit
zu einer Basis ergänzen. Nach (12.3) ist
damit
![]() . Laplace-Entwicklung nach den Spalten zeigt
jedoch induktiv nach
. Laplace-Entwicklung nach den Spalten zeigt
jedoch induktiv nach
![]() , daß alle
, daß alle
![]() -Teilmatrizen von
-Teilmatrizen von
![]() verschwindende Determinante besitzen, ein Widerspruch.
[]
verschwindende Determinante besitzen, ein Widerspruch.
[]
Beispiel.
(1) In manchen Fällen führt die Entwicklung nach einer Zeile oder
einer Spalte schnell zur Berechnung einer Determinante. Betrachten
wir etwa die Matrix

(2) In den meisten Fällen ist der beste Weg zur Berechnung einer Determinante die Anwendung von elementaren Zeilen- oder Spaltenoperationen. Betrachten wir als Beispiel die Matrix
Auch die Lösungen linearer Gleichungen können wir - sofern diese eindeutig sind - mittels Determinanten berechnen:
12.17 Cramer'sche Regel.
Falls
![]() invertierbar ist, so ist die Lösung von
invertierbar ist, so ist die Lösung von
![]() durch
durch

Beweis. Die Gleichung
Wenn
![]() invertierbar ist, dann ist
invertierbar ist, dann ist
![]() invertierbar
nach (6.22) und somit existiert eine eindeutige Lösung
invertierbar
nach (6.22) und somit existiert eine eindeutige Lösung
![]() von
von
![]() . Nach dem ersten Teil erfüllt diese
. Nach dem ersten Teil erfüllt diese
![]() , also folgt
, also folgt

12.18 Bemerkung.
Für die praktische Lösung von linearen Gleichungssystemen ist
die Cramer'sche Regel nicht besonders gut geeignet, weil die
Berechnung der vielen Determinanten zu aufwendig ist. Daher lösen
Computerprogramme lineare Gleichungssysteme nicht mit dieser
Methode. Um das zu sehen, bestimmen wir, wie viele
Rechenoperationen zur Lösung eines linearen Gleichungssystems mit
![]() Gleichungen in
Gleichungen in
![]() Unbekannten über einem Körper nötig
sind. Wir werden uns dabei auf die Multiplikationen und Divisionen
beschränken (die mehr Rechenaufwand benötigen) und Additionen,
Subtraktionen und Vertauschungen von Zeilen oder Spalten außer
Acht lassen.
Die Determinante einer
Unbekannten über einem Körper nötig
sind. Wir werden uns dabei auf die Multiplikationen und Divisionen
beschränken (die mehr Rechenaufwand benötigen) und Additionen,
Subtraktionen und Vertauschungen von Zeilen oder Spalten außer
Acht lassen.
Die Determinante einer
![]() -Matrix besteht aus
-Matrix besteht aus
![]() vielen
Summanden, von denen jeder
ein Produkt von
vielen
Summanden, von denen jeder
ein Produkt von
![]() Zahlen ist. Man benötigt also
Zahlen ist. Man benötigt also
![]() Multiplikationen.
Um ein
Multiplikationen.
Um ein
![]() -Gleichungssystem nach der Cramer'schen
Regel zu berechnen, muß man
-Gleichungssystem nach der Cramer'schen
Regel zu berechnen, muß man
![]() Determinanten von
Determinanten von
![]() -Matrizen berechnen, benötigt als
-Matrizen berechnen, benötigt als
![]() Multiplikationen. Anschließend braucht man noch
Multiplikationen. Anschließend braucht man noch
![]() Divisionen,
was aber kaum mehr ins Gewicht fällt. Berechnet man das explizit,
dann braucht man für ein
Divisionen,
was aber kaum mehr ins Gewicht fällt. Berechnet man das explizit,
dann braucht man für ein
![]() -System
-System
![]() Multiplikationen,
ein
Multiplikationen,
ein
![]() -System benötigt
-System benötigt
![]() Multiplikationen, für
Multiplikationen, für
![]() -Systeme sind
-Systeme sind
![]() Multiplikationen nötig und bei einem
Multiplikationen nötig und bei einem
![]() -System sind es schon
-System sind es schon
![]() Multiplikationen.
Multiplikationen.
Versuchen wir auf ähnliche Weise den Gauß'schen Algorithmus zu
analysieren, dann müssen wir nur bedenken, daß man nach Satz
(4.9) jede invertierbare
![]() -Matrix (der einzige Fall in
dem die Cramer'sche Regel funktioniert) durch elementare
Zeilenoperationen in die Einheitsmatrix umgewandelt werden kann,
was genau äquivalent zur Lösung des Systems ist. Betrachten wir
also die erweiterte Matrix
-Matrix (der einzige Fall in
dem die Cramer'sche Regel funktioniert) durch elementare
Zeilenoperationen in die Einheitsmatrix umgewandelt werden kann,
was genau äquivalent zur Lösung des Systems ist. Betrachten wir
also die erweiterte Matrix
![]() des Systems. Da wir
Vertauschungen von Zeilen ignorieren, dürfen wir annehmen, daß
die erste Zeile von
des Systems. Da wir
Vertauschungen von Zeilen ignorieren, dürfen wir annehmen, daß
die erste Zeile von
![]() mit einem Element ungleich Null
beginnt. Mit
mit einem Element ungleich Null
beginnt. Mit
![]() -Divisionen erreichten wir, daß die erste Zeile
mit
-Divisionen erreichten wir, daß die erste Zeile
mit
![]() beginnt. Um in den weiteren
beginnt. Um in den weiteren
![]() vielen Zeilen das Element in der
ersten Spalte zu Null zu machen, benötigen wir pro Zeile
vielen Zeilen das Element in der
ersten Spalte zu Null zu machen, benötigen wir pro Zeile
![]() -Multiplikationen. Somit sind wir mit
-Multiplikationen. Somit sind wir mit
![]() -Divisionen und
-Divisionen und
![]() Multiplikationen so weit, daß in der ersten Spalte der
erweiterten Matrix der erste Einheitsvektor
Multiplikationen so weit, daß in der ersten Spalte der
erweiterten Matrix der erste Einheitsvektor
![]() steht. Damit das
zweite Element der zweiten Zeile gleich Eins ist, brauchen wir
steht. Damit das
zweite Element der zweiten Zeile gleich Eins ist, brauchen wir
![]() Divisionen, und mit
Divisionen, und mit
![]() Multiplikationen
erreichen wir, daß in der zweiten Spalte der zweite
Einheitsvektor
Multiplikationen
erreichen wir, daß in der zweiten Spalte der zweite
Einheitsvektor
![]() steht. Induktiv sehen wir, daß wir
steht. Induktiv sehen wir, daß wir
![]() Divisionen und
Divisionen und
![]() Multiplikationen benötigen, und ein
Multiplikationen benötigen, und ein
![]() -Gleichungssystem mit
dem Gauß'schen Algorithmus zu lösen. Für ein
-Gleichungssystem mit
dem Gauß'schen Algorithmus zu lösen. Für ein
![]() -System
sind das
-System
sind das
![]() Divisionen und
Divisionen und
![]() Multiplikationen, bei einem
Multiplikationen, bei einem
![]() -System
-System
![]() Divisionen und
Divisionen und
![]() Multiplikationen und bei einem
Multiplikationen und bei einem
![]() -System
-System
![]() Divisionen und
Divisionen und
![]() Multiplikationen. Bei
einem
Multiplikationen. Bei
einem
![]() -System erhält man die moderate Zahl von
-System erhält man die moderate Zahl von
![]() Divisionen und
Divisionen und
![]() Multiplikationen.
Multiplikationen.